|
Seungyeon Yoo I am a Ph.D. candidate at Seoul National University, advised by Prof. H. Jin Kim. My research interests include robot AI, vision-based navigation, and visual representation learning. |

|
ResearchMy research focuses on building RGB-only autonomous robot systems. I have been exploring GS-based real-to-sim data generation to address the sim-to-real gap, monocular-camera-based target chasing through cross-modal learning, and single-view RL manipulation leveraging NeRF. I apply these approaches across diverse robot platforms, including drones, manipulators, and ground robots. I believe that RGB-focused robot systems can serve as a key pathway toward realizing human-level intelligence in robotics. |
|
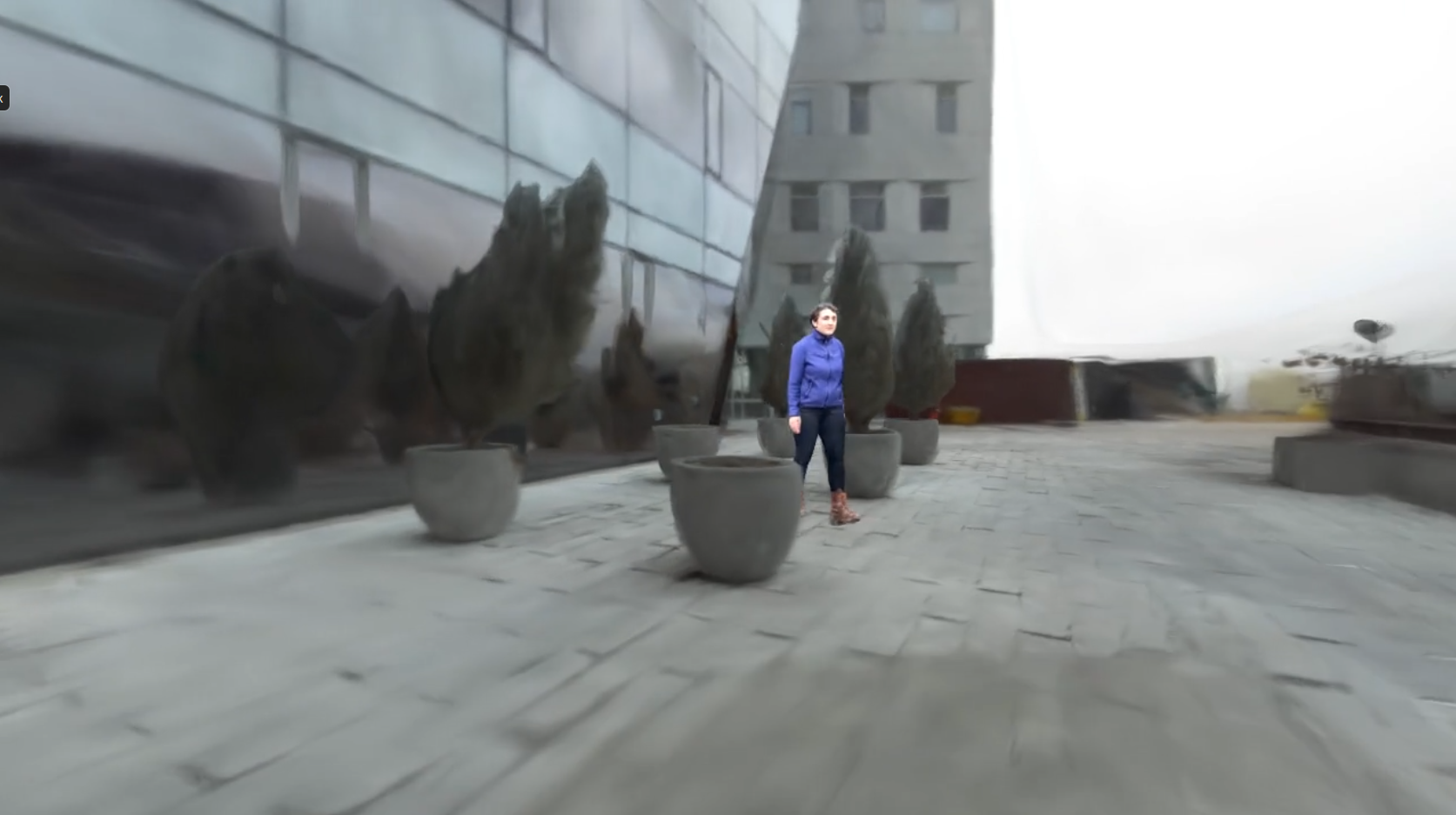
ReaDy-Go: Real-to-Sim Dynamic 3D Gaussian Splatting Simulation for Environment-Specific Visual Navigation with Moving Obstacles
Seungyeon Yoo, Youngseok Jang, Dabin Kim, Youngsoo Han, Seungwoo Jung, H. Jin Kim arXiv, 2026 project page / paper ReaDy-Go generates photorealistic navigation datasets for dynamic environments by combining a reconstructed static GS scene with dynamic human GS obstacles, and trains policies robust to both the sim-to-real gap and moving obstacles. |
|
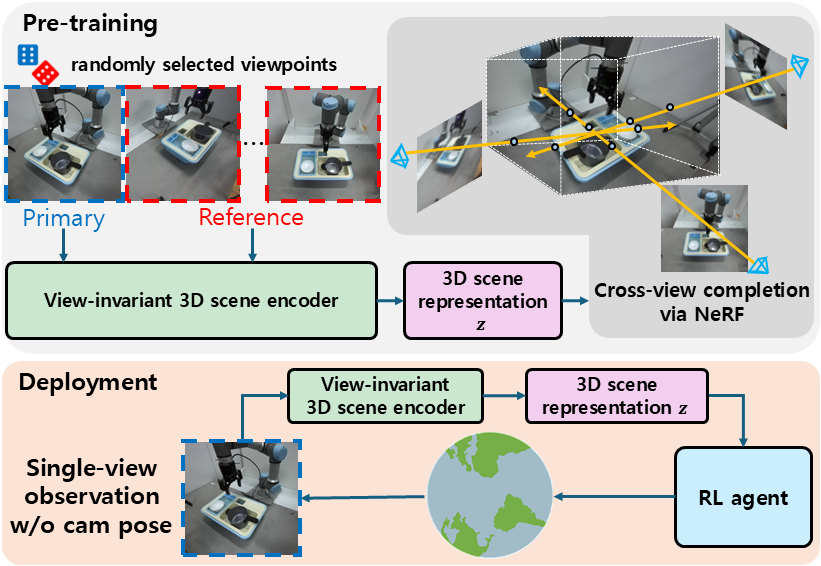
Single-View 3D-Aware Representations for Reinforcement Learning by Cross-View Neural Radiance Fields
Daesol Cho*, Seungyeon Yoo*, Dongseok Shim, H. Jin Kim RA-L, 2025 project page / paper / video / code We propose a novel RL framework that extracts 3D-aware representations from single-view RGB input, without requiring camera pose or synchronized multi-view images during the downstream RL. |
|
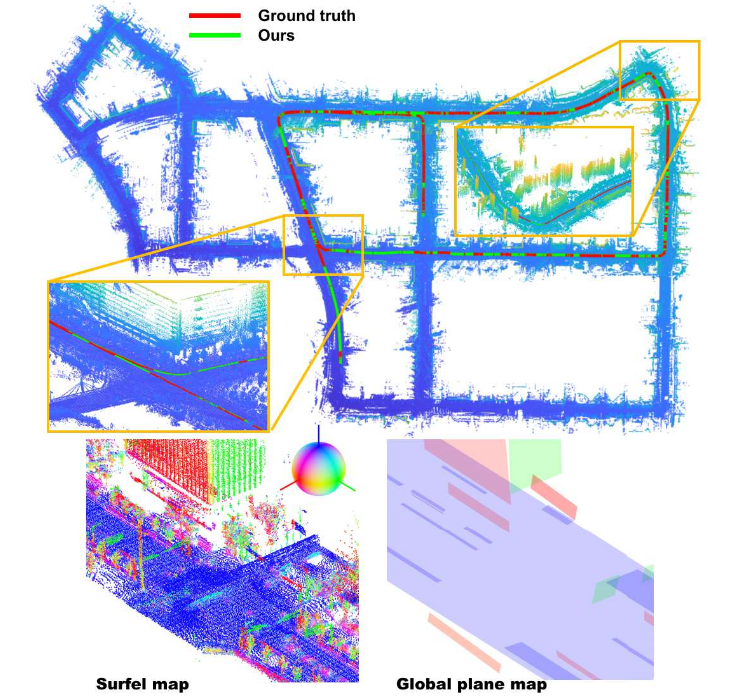
Plane-Based Stereo Visual Localization With a Prior LiDAR Map
Youngsoo Han, Youngseok Jang, Changhyeon Kim, Seungyeon Yoo, H. Jin Kim T-ITS, 2025 paper Drift in visual pose estimation is eliminated through plane-based joint optimization and the registration module. |
|
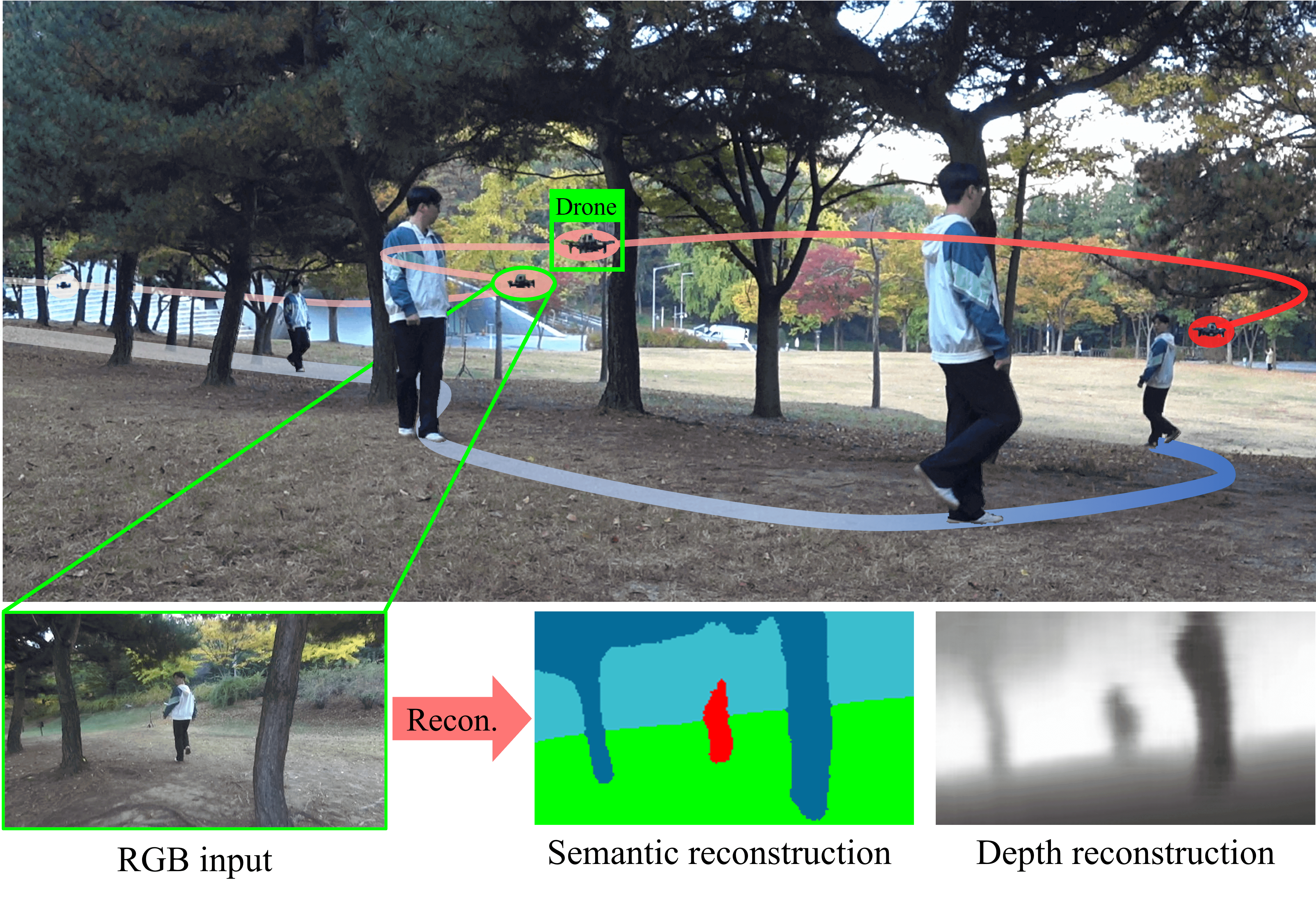
Mono-Camera-Only Target Chasing for a Drone in a Dense Environment by Cross-Modal Learning
Seungyeon Yoo*, Seungwoo Jung*, Yunwoo Lee, Dongseok Shim, H. Jin Kim RA-L, 2024 project page / paper / video Cross-modal representation enables RGB-only target chasing instead of multiple sensor inputs. |
|
This page was built with Dr. Jon Barron's template. |